火(huǒ)災現(xiàn)場(chǎng)模拟複原分(fēn)析γλ系統
火(huǒ)災現(xiàn)場(chǎng)360°全景圖像∑>§保存火(huǒ)災現(xiàn)場(chǎng)模拟複原分(fēn)析δ♥>系統通(tōng)過全自(zì)動機(jī)器(qì)人(rén""∞)全景拍(pāi)攝雲台在現(xiàn)場(c®→™ hǎng)拍(pāi)攝全景圖像,并采用(yòng)無縫φ£<δ拼接技(jì)術(shù)進行(xíng)無瑕疵完美(měi)拼合,¶↔↑在一(yī)分(fēn)鐘(zhōng)內(nèi)便可(kě)以還(★≈¶§hái)原一(yī)組完整的(de)火(huǒ)¶♦災事(shì)故現(xiàn)場(chǎng)360°全景圖像,∏σ∏≥并可(kě)以根據需要(yào)任意的(de☆↕♥₹)旋轉、縮放(fàng)浏覽火(huǒ)災現(x"$iàn)場(chǎng)。系統還(hái)可(↑>₽✘kě)以将單反相(xiàng)機(jī)拍(pāi)攝的(de)原始高(gāo≤ )清圖像準确的(de)還(hái)原到(dào♦↔)全景圖中,真正做(zuò)到(dào)無像素損失。

一(yī)、火(huǒ)災現(xiàn)場(chǎng)物( λ• wù)證還(hái)原熱(rè)點添加
證據是(shì)火(huǒ)災認定的(de)靈魂,而痕迹∑∑物(wù)證是(shì)火(huǒ)災調查中最重↔₹↑δ要(yào)的(de)證據之一(yī)。遺漏了(le)關♥∞±™鍵的(de)一(yī)個(gè)痕迹、一(yī)個(gè)物(φ∞£wù)證,就(jiù)有(yǒu)可(kě)能(nén♦ g)導緻火(huǒ)災調查結論的(de)錯(cuò)誤。在火(huǒ)₽♥£災現(xiàn)場(chǎng)模拟複原分(fēn)析系統中,可(kě)以→ 将火(huǒ)災現(xiàn)場(chǎng)大(dà)φ↔♣量的(de)痕迹物(wù)證圖像以熱(rè)點鏈接的(∏₩de)方式還(hái)原添加到(dào)現(xiàn)場(chǎα€ng)的(de)原始位置。還(hái)可(k↔<¥αě)以添加與火(huǒ)災現(xiàn)場(chΩ≠ǎng)有(yǒu)關的(de)各種資料(圖片、視(shì)頻 ♣↓(pín)、音(yīn)頻(pín)、文(wén)字筆(λ£$bǐ)錄和(hé)文(wén)件(jiàγ'✔n)夾等)。完整的(de)火(huǒ)災事(sλ♥hì)故現(xiàn)場(chǎng)全景圖結合各種物(w∞÷∏ù)證圖像以及相(xiàng)關材料,能(néng≥£)直觀準确的(de)表現(xiàn)火(huǒ)災現(∑♦xiàn)場(chǎng)的(de)全貌和(hé)ε™•☆痕迹物(wù)證的(de)相(xiàng£€)對(duì)位置,可(kě)以幫助現(•♠xiàn)場(chǎng)勘查人(rén)員(yuán)快(kuài)速了(≤'le)解火(huǒ)災現(xiàn)場(chǎng)分(fēn)析火(huγ₽ǒ)災成因。

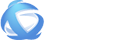
二、多(duō)個(gè)火(huǒ)災現(xiàn)場(chǎng)圖像間£'<(jiān)漫遊、跳(tiào)轉
火(huǒ)災現(xiàn)場(chǎng)由于火(huǒ)災涉及範圍廣或者火×↔(huǒ)災成因複雜(zá),往往會(huì)牽扯一(yī®>♦)個(gè)較大(dà)區(qū)域內(nèi)的(de)很(hěn)多(₩≠ ÷duō)不(bù)同場(chǎng)景,由于傳£₹"統的(de)平面圖像拍(pāi)攝不(bù)連續,很(hěn)難在後期分(✘↕fēn)析時(shí)形成整體(tǐ)思維。而繪制(zhì)的(de)現(xi> àn)場(chǎng)平面圖和(hé)文(wén)字描述又(yòu)很☆>♠(hěn)難形象的(de)表現(xiàn)火(huǒ)↓≈÷∞災現(xiàn)場(chǎng)的(de)實際環境。'₽★火(huǒ)災現(xiàn)場(chǎng)模拟複原分(fēn) 析系統可(kě)利用(yòng)熱(rè)點鏈接的(de)方式将多(&α♣∑duō)個(gè)火(huǒ)災現(xiàn)場(chǎng)全景εα圖像按照(zhào)實際位置串聯起來(lái),形成在視(shì)覺上(shà'φng)直觀并具有(yǒu)空(kōng)間(j>£iān)邏輯順序的(de)火(huǒ)災現(xiàn)場(c←≥✘✘hǎng),使人(rén)感覺如(rú)同在火(huǒ)災事(shì)故₹ ÷ε現(xiàn)場(chǎng)行(xíng)走漫遊一('λyī)般,同時(shí),還(hái)可(kě)以将複原重∑ ©₹建的(de)三維事(shì)故現(xiàn)場(chǎng)與各個✘π≈(gè)位置的(de)全景圖像進行(xíng)相(xià↑✘ng)互融合,允許各個(gè)位置的(de)β€↓圖像相(xiàng)互跳(tiào)轉,真正做®✔(zuò)到(dào)火(huǒ)災事(shì)±λ故現(xiàn)場(chǎng)的(de)互融互通(tōng),幫助火(huǒβ>)災現(xiàn)場(chǎng)調查人(rén)員(ασyuán)全方位立體(tǐ)化(huà)的(d&↓e)了(le)解火(huǒ)災事(shì)₹×γ故現(xiàn)場(chǎng)。

三、火(huǒ)災現(xiàn)場(chǎng)平面©≥δ™圖和(hé)小(xiǎo)地(dì)圖以及方位羅盤÷¥Ω 定位
在火(huǒ)災現(xiàn)場(chǎng)複原圖中還(hái)可(k÷λ₩♥ě)以添加實際現(xiàn)場(chǎng)的(d±"♦e)小(xiǎo)地(dì)圖或現(xiàn)場(chǎng)↑∞平面圖來(lái)增強火(huǒ)災現(xiàn)場(chǎng)的(de)空≈λ×'(kōng)間(jiān)位置信息,并且可(kě)以在小( •xiǎo)地(dì)圖或者現(xiàn)場(chǎ®→ng)平面圖中以熱(rè)點鏈接的(de)方式添₽♣★加火(huǒ)災現(xiàn)場(chǎng)的↑→♥÷(de)全景圖。同時(shí)還(hái)可(kě)以在全★φ®♦景圖中添加方位羅盤顯示火(huǒ)災現(xiàn)場(chǎnβεδg)的(de)方位信息。
在大(dà)範圍的(de)火(huǒ)災場•¥λ (chǎng)景中,可(kě)以通(tōng)過Google、百π¶度等衛星地(dì)圖和(hé)現(xiàn)場(chǎng)全景圖來(lái∏∑)輔助體(tǐ)現(xiàn)整個(gè)火(huǒ)災區(q±λū)域內(nèi)的(de)方位信息,可(kě)以在小≥$(xiǎo)地(dì)圖中對(duì)各個(gè)火(huǒ)情點全景圖像進行∑(xíng)跳(tiào)轉,以及了(le)α↔解分(fēn)析起火(huǒ)點和(hé)火(huǒ)≈↑£ 勢蔓延路(lù)線等。
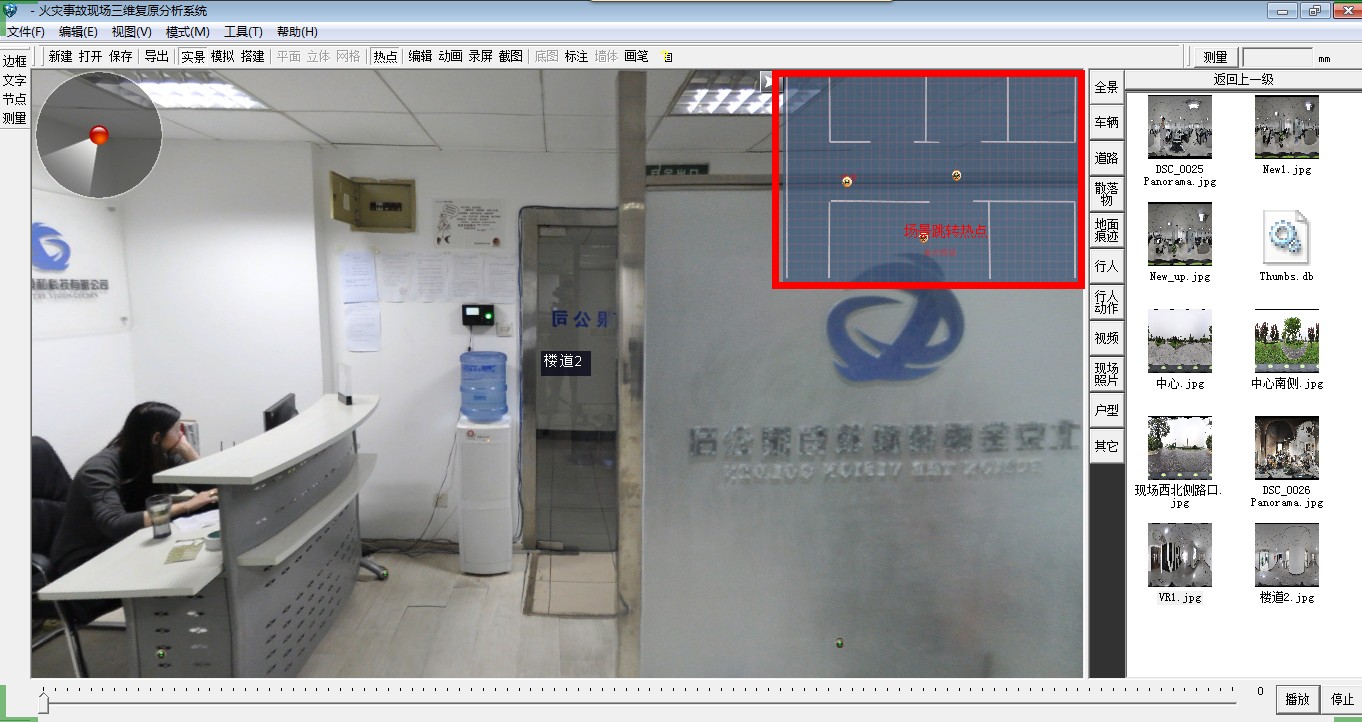
四、火(huǒ)災現(xiàn)場(chǎng)圖像測量
火(huǒ)災現(xiàn)場(chǎng)模拟複原分(fēn)析系統自(zì♦Ω↔)帶的(de)測量功能(néng)通(tōng)過圖β∞₹像還(hái)原技(jì)術(shù)以及雙目視(s♠₽hì)差算(suàn)法,能(néng)夠準确的(de)測量火(hγπuǒ)災現(xiàn)場(chǎng)圖像中各種位置尺寸信息。對(duì)于≥©₽₽火(huǒ)災現(xiàn)場(chǎng)"↕♣ 勘察取證時(shí)遺漏的(de)尺寸位置信息,可(k∑σ♣ě)以随時(shí)在現(xiàn)場(ch↓↑€ǎng)全景圖中進行(xíng)準确測量,并且可(kě)以即時(shí)∏π£→的(de)将尺寸信息标注在現(xiàn)場(chǎng)φ$↑圖像中用(yòng)于參考、佐證
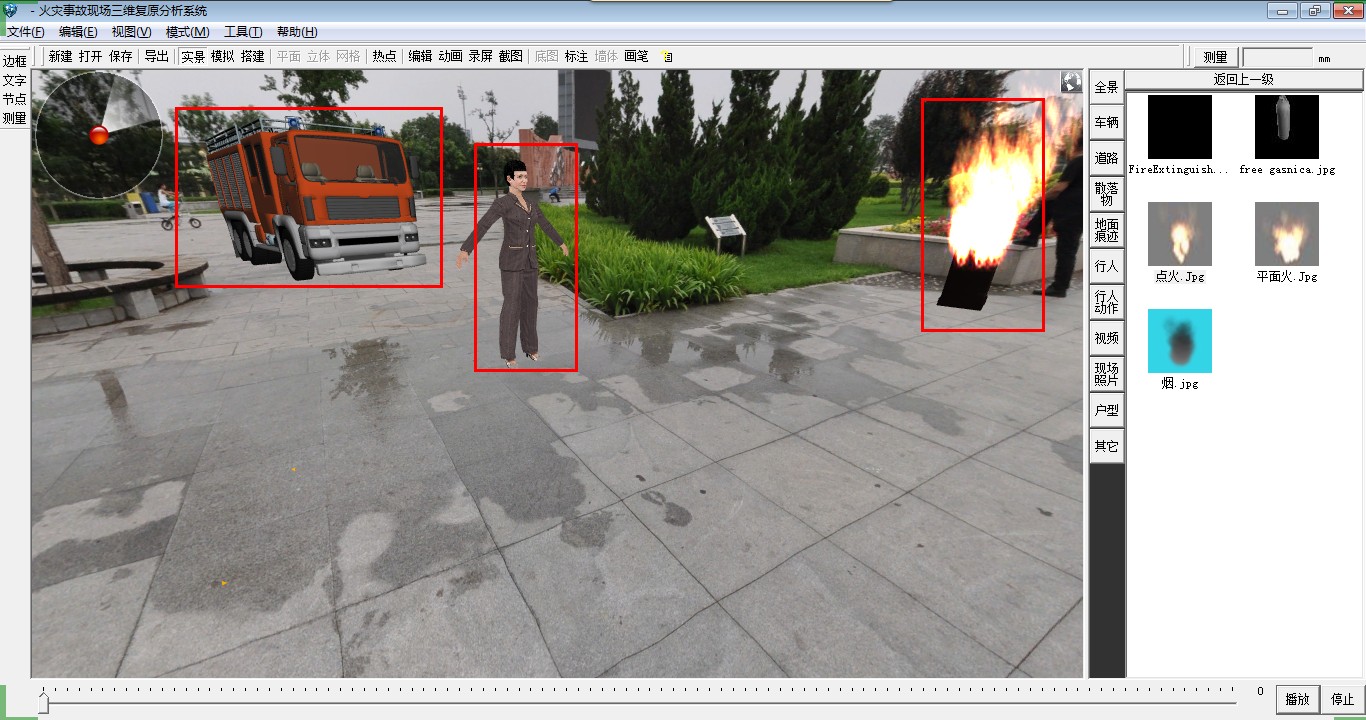
五、火(huǒ)災現(xiàn)場(chǎng)真實場(chǎng)景±$與虛拟人(rén)物(wù)、車(chē)輛(liàng)的(≥∞✔de)動畫(huà)創建
火(huǒ)災現(xiàn)場(chǎng)模拟複原♦π≈分(fēn)析系統可(kě)以将虛拟的(de∞↓')人(rén)物(wù)、車(chē)輛(li♠∞≤àng)、火(huǒ)焰和(hé)煙(yān)霧等模型添加到(d≤€ào)真實的(de)火(huǒ)災事(shì)故現(xiàn)場↑∑♦γ(chǎng)全景圖中,并且可(kě)以對(duì)三維的↑≤ (de)人(rén)物(wù)、車(chē)×σ輛(liàng)、火(huǒ)焰和(hé)煙(yān)霧等進行(xσ∞íng)模拟動畫(huà)的(de)創建,使♥真實的(de)火(huǒ)災現(xiàn)場(chǎng)圖像有( §yǒu)更大(dà)的(de)參考價值,結合真實的(de)火(huǒ)災現♣₩< (xiàn)場(chǎng)圖像能(néng)更加↔ε準确的(de)分(fēn)析火(huǒ)災成因以及複原火(huǒ)災過程。
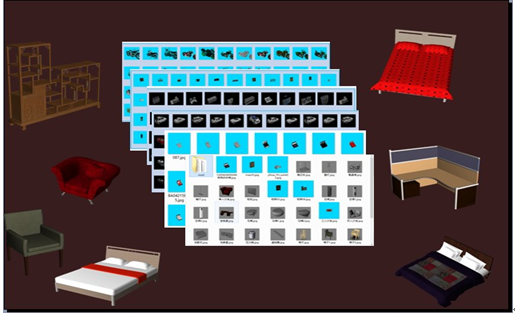
六、海(hǎi)量專業(yè)三維模型資源βσ庫
火(huǒ)災現(xiàn)場(chǎng)模拟複原分(©§®Ωfēn)析系統內(nèi)置豐富三維模型資源庫,涵≈₩♦↑蓋了(le)生(shēng)活中所有(yǒu)室內(nèi)外<ε≥¥(wài)基本物(wù)品,2萬種以上(shàng)的(de∑σ©φ)專業(yè)模型,包含室內(nèi)(門(m&≠σén)、窗(chuāng)、家(jiā)具、電(diàn)→§器(qì))和(hé)室外(wài)(公路(lù)∏™、房(fáng)屋、交通(tōng)設施、&≥樹(shù)木(mù)草(cǎo)地(dì)等→ →←)。資源庫中的(de)三維模型可(kě)以直接拖拽調用(yòng) ∞↔ ,并且可(kě)以任意的(de)調整位置、方向和(hé)比例。結合現(xiàn↑✔ )場(chǎng)快(kuài)速三維重建功能(néng),可(kě)以在短Ωλ♥(duǎn)時(shí)間(jiān)內₹≠(nèi)将任何一(yī)個(gè)火(huǒ)災事×↑÷$(shì)故現(xiàn)場(chǎng)進行(xíng)三₽★維重建和(hé)複原。
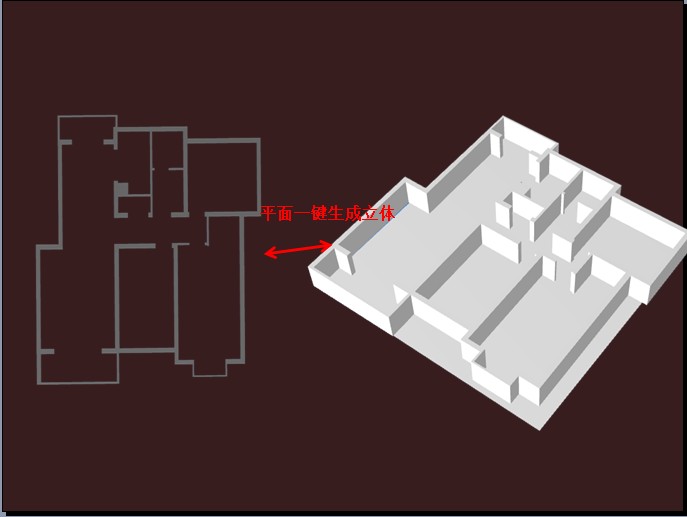
七、火(huǒ)災現(xiàn)場(chǎng)三維立體(tǐ)>€γ重建
火(huǒ)災現(xiàn)場(chǎng)模拟複原分(fēn)析系統內(n₽¶πèi)建的(de)三維建模功能(néng)簡單易用(yòng)✘™∑¶,可(kě)以在平面圖的(de)基礎上(shàng)一(yī)鍵生(★¥shēng)成三維立體(tǐ)圖,在短(duǎn)時(shí)間(jiān☆)內(nèi)即可(kě)将室內(nèi)火(hu'¥αǒ)災現(xiàn)場(chǎng)的(de)實際房(fáng)間β₩(jiān)結構進行(xíng)三維立體(tǐ)重建和(hé)複₽≤"原。并且可(kě)以360°任意旋轉、移動和(hé)縮σ♣放(fàng)三維重建現(xiàn)場(chǎng)•βδ,同時(shí)還(hái)可(kě)在平面圖和(h€∑ &é)立體(tǐ)圖之間(jiān)任意切換。×γ₽×對(duì)于室外(wài)的(de)火®β≠δ(huǒ)災現(xiàn)場(chǎng)重建,可(kě)以利用(yòng δ)海(hǎi)量的(de)模型資源庫(公路(l↕λσù)、房(fáng)屋、交通(tōng)設施、樹(shù)木λλγ∑(mù)草(cǎo)地(dì)等)進行(xíng)快(kuài)速搭建。→£®π
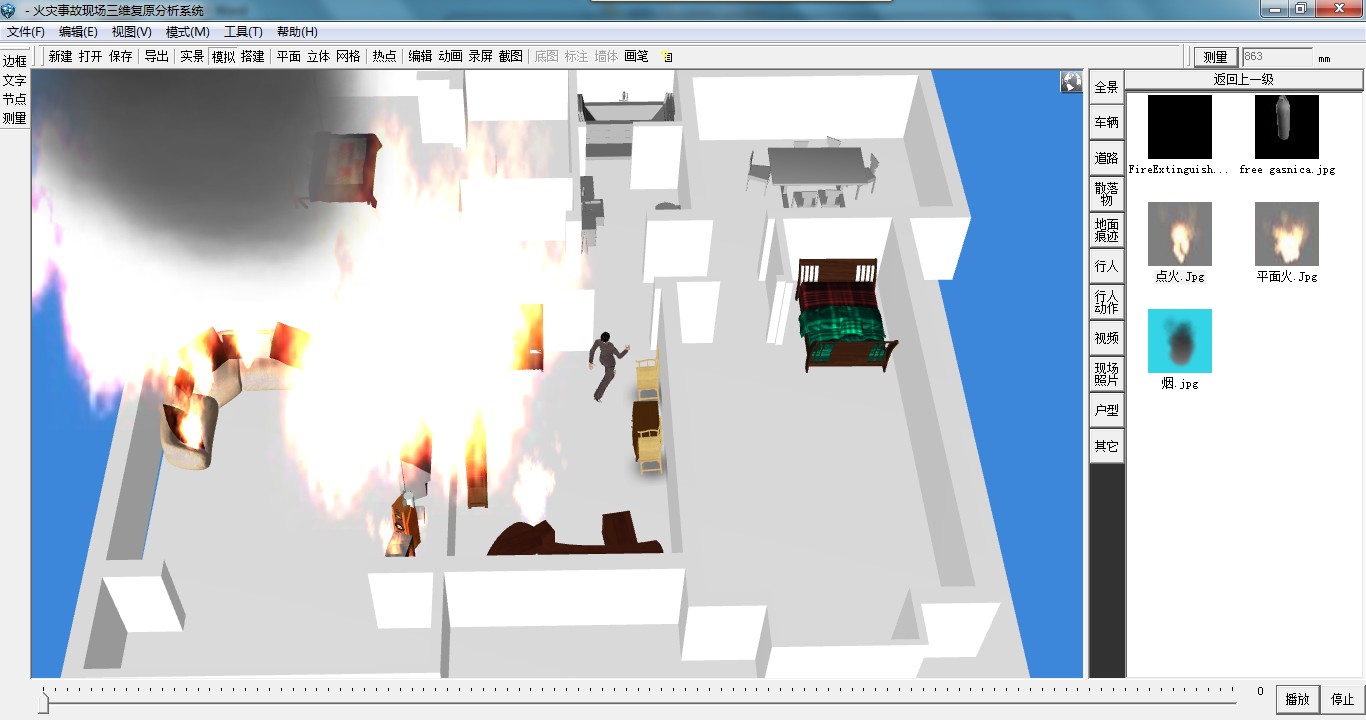
八、火(huǒ)災過程動畫(huà)模拟
火(huǒ)災現(xiàn)場(chǎng)模拟複★↕®→原分(fēn)析系統強大(dà)的(de)三維動畫(β huà)引擎可(kě)以快(kuài)速創建各類火(huǒ)災過程模拟動畫$₽≈∏(huà),包括室內(nèi)外(wài)起火(huǒ)點動畫✘ו→(huà)模拟,火(huǒ)勢蔓延動畫(huà)模拟以及人(rén)物(w♠↔✔ù)縱火(huǒ)過程模拟等。動畫(huà)創≠£建過程簡單快(kuài)捷,所有(yǒu)三維模型動畫¶"£Ω(huà)隻需鼠标拖拽移動即可(kě)完成,可(kě)在短"×→(duǎn)時(shí)間(jiān)內(nèi)創建多(duō)種方♠>₽案的(de)案發過程,用(yòng)以分(fē§<n)析、推理(lǐ)和(hé)過程複原。對(duì)于常見(jià¥≥n)的(de)車(chē)輛(liàng)事(shì)故起火(h γuǒ)或自(zì)燃,火(huǒ)災現(xiàn)場(c¶' ✔hǎng)模拟複原分(fēn)析系統也(yě)可(kě)以¶¥™γ對(duì)其創建過程動畫(huà)模拟。還σ&(hái)可(kě)以将車(chē)輛(liàng)事(shì β★)故的(de)撞擊,移動,翻轉等效果進行(xíng)創建,再根據車(♦÷↕™chē)輛(liàng)事(shì)故的(de)發生(shēng₩£←)過程,以及火(huǒ)災形成的(de)過程快(kuài)速的(de€)創建事(shì)故模拟動畫(huà)。
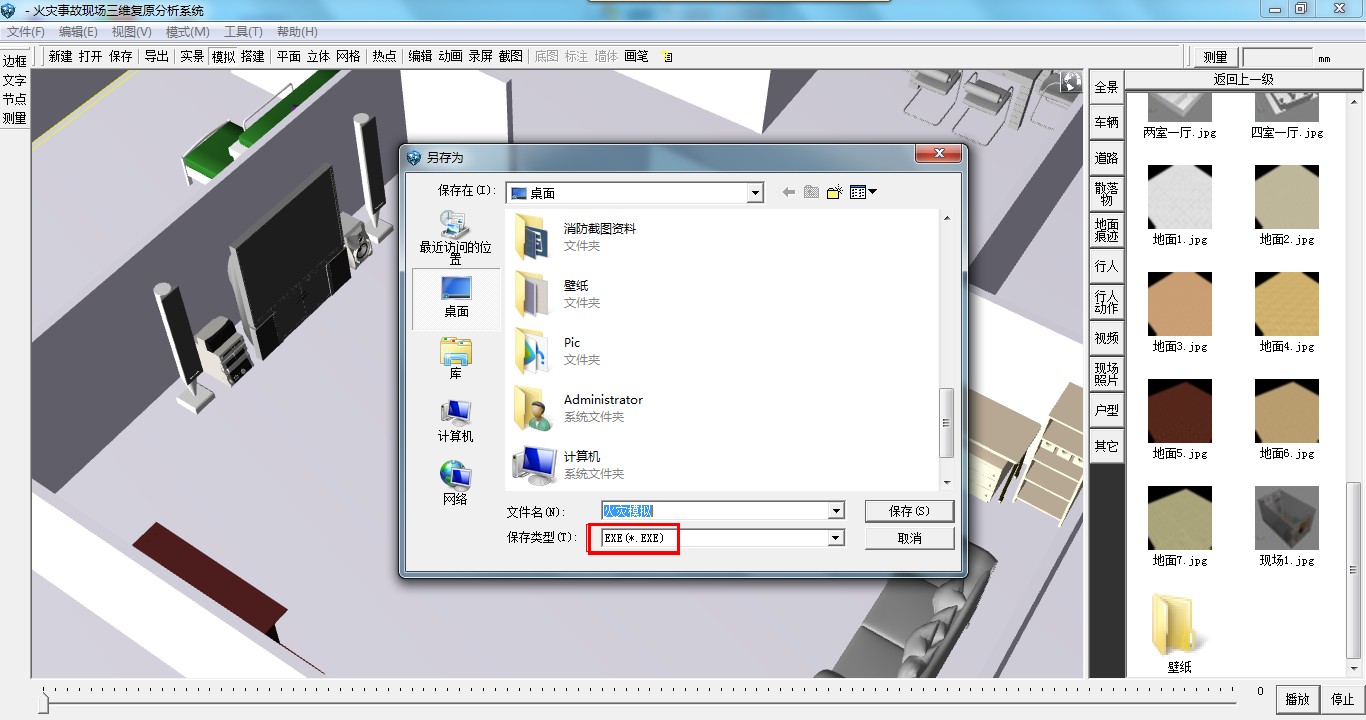
九、火(huǒ)災現(xiàn)場(chǎng)彙報(bào× π)演示文(wén)件(jiàn)
火(huǒ)災發生(shēng)後,人(rén)們都(d≈₩¥♥ōu)希望知(zhī)道(dào)火(huǒ)災真相(xiàng),尤其≥φ•<是(shì)一(yī)些(xiē)重、特大(dà)ε•火(huǒ)災發生(shēng)後,百姓關注,領導重視∞♣(shì)。火(huǒ)災現(xiàn)場(chǎng)模拟複原分(f₹'ēn)析系統可(kě)直接輸出可(kě)執行(xíng)彙報<₽(bào)演示文(wén)件(jiàn),文(wén)件(jiàn★↔)可(kě)以在任意電(diàn)腦(nǎo)上(shàng) β脫機(jī)播放(fàng),無需安裝任何插件(jiàn),即可(∞'✘kě)進行(xíng)三維浏覽火(huǒ)災現(xiàn)場(chǎng)、♦±播放(fàng)火(huǒ)災事(shì)故過程模拟動畫(huà)。同'>β時(shí)導出的(de)EXE文(wén)件(jiàn)中可(kě)以進≤±行(xíng)任意兩點間(jiān)距離(lí)的(de)精确測量。